Xufeng Zhao
Home
Publications
Posts
Experience
Awards & Grants
Contact
CV
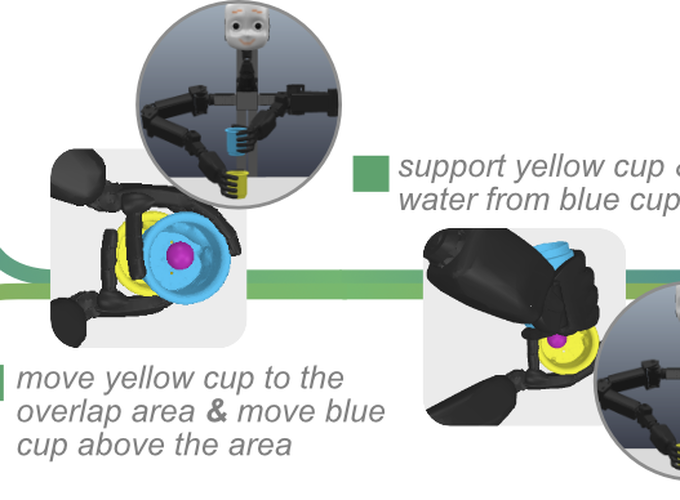
Large Language Models for Orchestrating Bimanual Robots
Kun Chu
,
Xufeng Zhao
,
Cornelius Weber
,
Mengdi Li
,
Wenhao Lu
,
Stefan Wermter
June 2024
Go to Project Site
LLMs
Robotics
Next
Details Make a Difference: Object State-Sensitive Neurorobotic Task Planning
Previous
Causal State Distillation for Explainable Reinforcement Learning
Cite
×